
KeyWords: AGV,干渉,経路計画,ルール,ダイクストラ法,遺伝的機械学習,自律分散
1、研究背景・目的
 近年、製鉄工場,半導体工場,物流ターミナル施設,病院等における搬送システムでは、
無人搬送者(AGV:Automated Guided Vehicle) が、広く用いられています.
近年、製鉄工場,半導体工場,物流ターミナル施設,病院等における搬送システムでは、
無人搬送者(AGV:Automated Guided Vehicle) が、広く用いられています.本研究では複数のAGV間の衝突やすれ違い (衝突とすれ違いをあわせて干渉とよぶ) を防ぐために,個々のAGVが最短経路を算出した上で,干渉が発生した際にはどちらか 一方が再経路計画を行う,ということを繰り返すことで,すべてのAGVが干渉無くかつ最短で目的地に到着する 経路の獲得を目指します.
 AGVの経路計画法は従来,AGVに問題が発生
したときには,一度司令塔を介してAGVに指示
を与える集中型の方法がとられてきましたが,
本研究では問題が発生したAGV同士で交渉し,
どちらが道を譲るかを決める自律分散型の方法
を用いています.
AGVの経路計画法は従来,AGVに問題が発生
したときには,一度司令塔を介してAGVに指示
を与える集中型の方法がとられてきましたが,
本研究では問題が発生したAGV同士で交渉し,
どちらが道を譲るかを決める自律分散型の方法
を用いています.
2、研究手法
○をノード,線をアークとして,1単位時間に1つのアークを移動するものとします.
まず,それぞれのAGVにダイクストラ法を適用して最短経路を求めます.
すべてのAGV間において干渉がおきていなければ終了,
そうでなければ早く干渉が起きたAGV同士から交渉することで,どちらが道を譲るかを決め,再経路計画を行います.
譲る側のAGVがノード番号と時刻を1ノードとする新たなグラフ上で,アークの重みを増やすことで譲られる側の AGVが通りすぎるのを待つか, 迂回路を得ることもできます.AGVの交渉はif-then形式のルールに基づいて行われます. ルールはAGVの状態からなる前件部とどちらのAGVが道を譲るかの後件部からなります.
 干渉が起こった両AGVの状態によって決まった前件部がルールの前件部と一致するならそのルールを適用します.
一致するルールがなければルールとの距離を求め,最も距離が短くなるようなルールを適用します.
このようなルールは,1つのルールを1つの遺伝子に対応させた遺伝的機械学習を適用して自動的に修正・獲得していきます.
干渉が起こった両AGVの状態によって決まった前件部がルールの前件部と一致するならそのルールを適用します.
一致するルールがなければルールとの距離を求め,最も距離が短くなるようなルールを適用します.
このようなルールは,1つのルールを1つの遺伝子に対応させた遺伝的機械学習を適用して自動的に修正・獲得していきます.
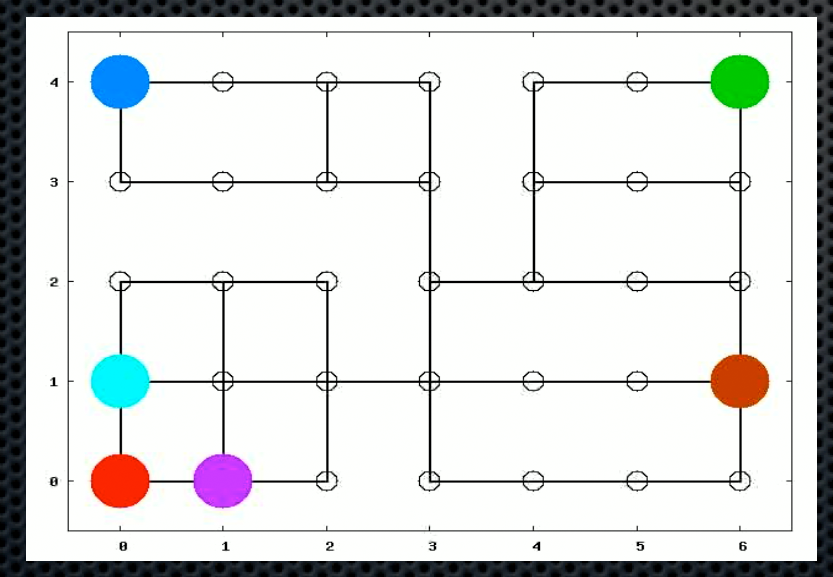
シミュレーション画面
譲る側のAGVがノード番号と時刻を1ノードとする新たなグラフ上で,アークの重みを増やすことで譲られる側の AGVが通りすぎるのを待つか, 迂回路を得ることもできます.AGVの交渉はif-then形式のルールに基づいて行われます. ルールはAGVの状態からなる前件部とどちらのAGVが道を譲るかの後件部からなります.
干渉が起こった両AGVの状態によって決まった前件部がルールの前件部と一致するならそのルールを適用します.
一致するルールがなければルールとの距離を求め,最も距離が短くなるようなルールを適用します.
このようなルールは,1つのルールを1つの遺伝子に対応させた遺伝的機械学習を適用して自動的に修正・獲得していきます.
シミュレーション画面